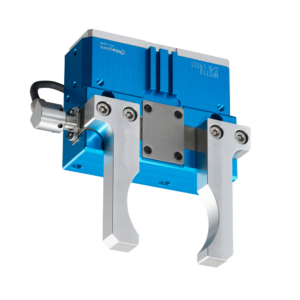
3-jaw parallel gripper NTB series
3-jaw parallel gripper NTB series
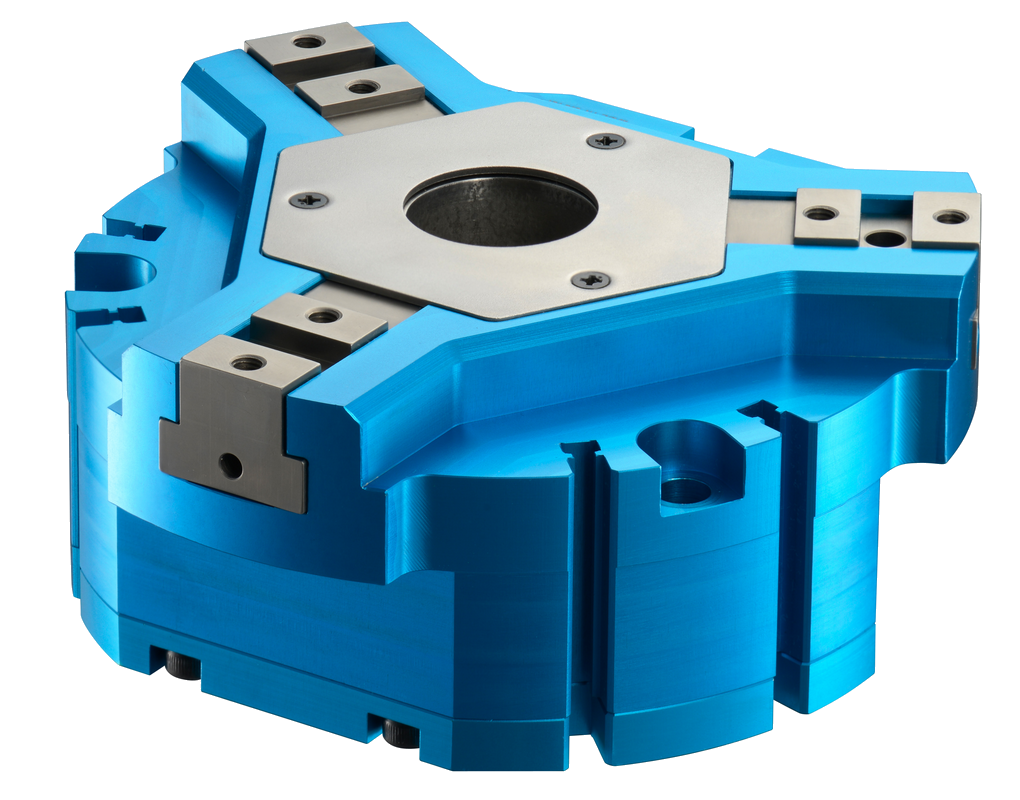
New 3-jaw parallel gripper with through-hole
NTB series
- Swarf protection and maintenance improved
- High gripping force for stable gripping of heavy work piece
- Lightweight and compact body not limiting load capacity of robot
- New mounting style for smaller protrusion compared with conventional models
- Improved gripping accuracy due to highly rigid body
Product Specifications
Specifications
| Model | Jaw Stroke Diameter (mm) | Through-hole Diameter (mm) | Gripping Force (Note 2) | Repeatability (mm) | Mass (kg) | Air Consumption per reciprocating (cm3) | Air pressure (MPa) | Operating Temperature (℃) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Measurement Distance (Note 1) L(mm) | OD Gripping (N) | ID Gripping (N) | ||||||||
| NTB309 | 12 | 14.3 | 10 | 1110 | 1270 | ±0.015 | 0.70 | 38.0 | 0.2~0.8 | 5~60 |
| NTB311 | 16 | 25 | 20 | 1510 | 1750 | ±0.015 | 1.20 | 80.4 | 0.2~0.8 | 5~60 |
| NTB313 | 20 | 29.9 | 20 | 3580 | 3750 | ±0.015 | 2.10 | 190.1 | 0.2~0.8 | 5~60 |
| NTB317 | 25 | 50 | 20 | 7440 | 9000 | ±0.02 | 7.50 | 465.1 | 0.2~0.8 | 5~60 |
- The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
- Value at supply air pressure 0.6 MPa.
All data and specifications are subject to change without notice. Please consult us for the latest details, technical data and/or specifications to confirm requirements.